
服务热线:1751168309217511683092
服务热线:1751168309217511683092
0 引言
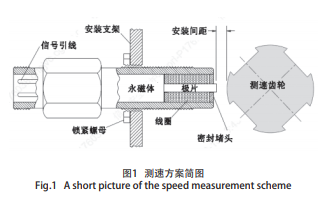
在大型转动机械的转速测量工作中,测速探头搭配测 速齿轮的测速方式是最常用、最成熟的技术方案。测速齿 轮常随转动设备一同供货,更换测速齿轮存在价格昂贵、 定制周期长等问题。此外,部分测速齿轮通过转动机械的 转子轴头铣得,无法更换且修复困难。
1 现存问题描述
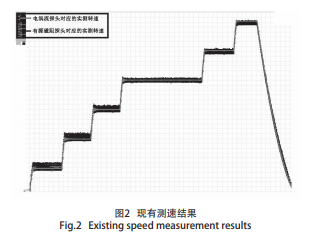
在国内某大型转机的测速环节中,选择霍尔式传感器 搭配测速齿轮的技术方案,如图 1 所示。由于测速齿轮损 伤,测速结果出现大幅波动,测试结果如图 2 所示。
2 离线试验
由试验及现场应用经验,电涡流探头在试件损伤的情 况下测速结果较好。将试件安装至转速校验 台上,安装测速探头,并将测速探头分别接至测速装置和 快速记录仪;测速装置通过以太网连接至调试笔记本,实 时监测实测转速。通过调试笔记本的转速曲线和快速记录 仪的探头波形记录曲线,用以分析试件损伤、校验台转速 以及不同探头类型对测速结果的影响。由于电涡流探头测速结果良好,为对比分析,将电涡 流探头和霍尔探头同时接进转速测量装置进行试验,当低转速时,转速测量装置无法检测 MPU 的有效信号, 故转速恒为 0RPM ;当转速升至 1500RPM 时,转速测量装 置可以检测 MPU 的有效信号, 但转速波动较大。当实际转 速为 1500RPM 时,测速结果偏差约为 ±80RPM。随着转 速的升高,测速误差逐渐减小。至 3000RPM 时,测速误差 约为 ±5RPM。
3 原因分析
MPU 的测量原理为磁 / 电感应,即当穿过线圈的磁通 变化时,线圈会感应出电压,且磁通变化越快,感应电压 越大。由于磁通的变化率可通过转速体现,故转速越快, 输出电压越大。转速测量装置中 MPU 测速通道的有效电压为 1Vrms ~ 35Vrms。当低转速时,由于磁通变化率小,感应电压较 低,故转速测量装置无 MPU 的测量转速;随着实际转速的 逐渐升高,感应电压逐渐增大,当某一齿对应的感应电压 超过最低值时,转速测量装置的 MPU 监测通道能够测量到 转速信号。MPU 处试件凹面的示意图如图 11A 所示。由于凹面为 平面, 故当探头轴线和凹面垂直时磁通最小,且此时磁通 变化率为 0。由于试件逆时针旋转,故在此过程中磁通量 先减小后增大,对应感应电动势由负值变为正值,从而形 成正常过零现象,由于霍尔探头的输出波形为边缘陡峭的频率信号,故 转速测量装置中的阈值调整方法无法完成有效的波形预处 理功能,进而导致转速测量装置测量结果波动。前置器通过其内部振荡器产生高频电流,通 过延长电缆送至探头线圈。由于电磁感应,线圈产生交变 磁场并作用于被测体。由于涡流效应,被测体上感应出交 变涡流。交变涡流感应出交变磁场,并反作用于探头线圈, 引起线圈上交变电流的幅值和相位变化(变化程度受探头与被测体距离影响)。检测电路监测该幅值和相位变化,经 放大器等运算电路得到反映探头与被测体距离的电压信号。
4 结论
电涡流探头为位移测量传感器,其输出信号为连续电 压信号。其输出信号经转速测量装置的预处理环节后,能 够输出规整的波形,消除试件缺陷的影响,进而获得良好 的测速效果。电涡流探头的缺点为元件数量多,单一元件损坏可能 影响整体测量功能,故障率较高。霍尔探头以霍尔元件为核心,体积小、寿命长、灵敏 度高、抗干扰能力强,输出信号稳定。此外,该有源探头 的测量过程不受转速影响,能够实现全转速范围内的高精 度转速波形拾取。
免责声明:文章仅供学习和交流,如涉及作品版权问题需要我方删除,请联系我们,我们会在第一时间进行处理。



